TactorBots: A Haptic Design Toolkit for Exploration of Emotional Robotic Touch





Team
Company | Institution
Category
Type
Project description
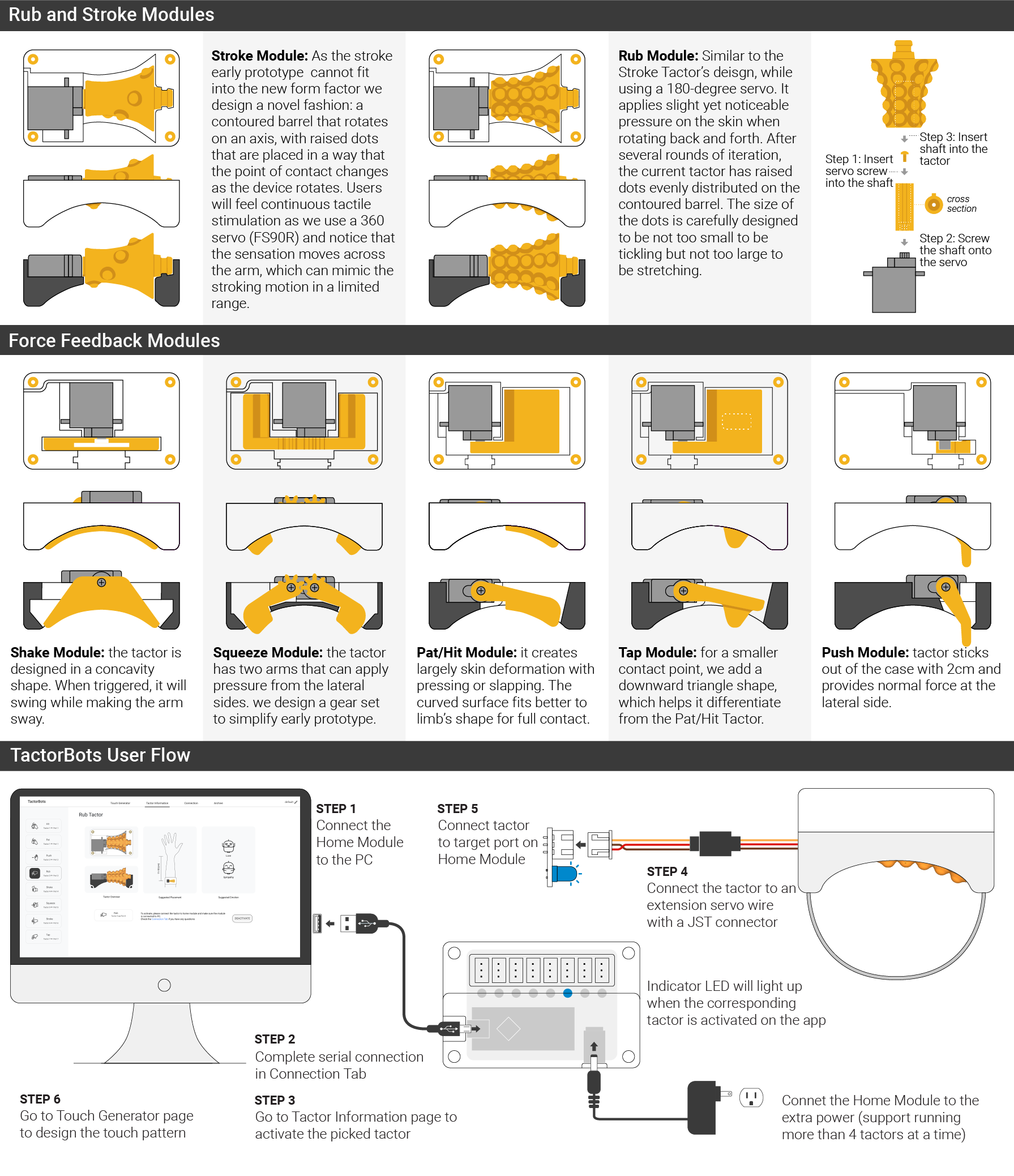
TactorBots is a haptic toolkit to empower designers to explore emotional robotic touch. It contains eight plug-and-play wearable tactor modules that render a series of social gestures driven by servo motors. Our specialized web GUI allows easy control, modification, and storage of tactile patterns to support fast prototyping. Taking emotional haptics as a “design canvas” with broad opportunities, TactorBots is the first “playground” for designers to try out various tactile sensations, feel around the nuanced connection between touches and emotions, and come up with creative imaginations.
This work is inspired by the psychological findings that humans can convey specific emotions (e.g., anger, fear, happiness) to each other using social touch patterns. For instance, humans usually squeeze another person’s arm with trembling when afraid. This discovery of emotional haptics opens up a new opportunity for designers to enrich their work with more meaningful, connecting, and engaging interactions. However, nowadays’ haptic design is mainly restricted to vibration, which lacks the versatility of touch that a human’s hand can perform. After several iterations and evaluations, we designed TactorBots that can render a large number of robotic gestures driven by low-cost, lightweight micro servos. The open-source and user-friendly platform invites and enables designers with no background in engineering or haptics to create rich touch patterns that convey expressive signals.
MOTIVATION AND IMPACT
Touch, the very first sense to develop in the womb, is the primary sense for humans to explore the physical world and is integral to our everyday lives. As an interaction designer, I am particularly interested in exploring the power of the touch and am devoted to bringing haptic elements into my work. When first learning about the psychological findings that humans can communicate specific emotions to each other through touch alone, I was provoked to think about what if we could design robotic touches that express emotions and what novel design opportunities it would open up. To answer these questions, I built our team and started our journey. When starting the exploration, however, we noticed that the innovation about haptics is mostly restricted to market or academic research with expert hapticians. The design community with well-established theories and experiences of emotional design is not involved enough. The key challenge is a lack of easy-to-use haptic design tools, especially beyond conventional vibration, as imaging a haptic cue without direct perception is challenging, and building a haptic device from scratch requires specialized engineering skills.
To address this, we developed TactorBots, an open-source toolkit that empowers designers to explore emotional robotic touch and foster rapid prototyping, reflective perception, alternative interpretations, and creative imaginations. We deployed TactorBots and a custom booklet as design probes to a group of designers, artists, and researchers for a co-speculation exploration on envisioning the future of emotional haptics.
When designing with TactorBots, participants commented:
“It was magical to feel the tactor moving for the first time.”
“I was just surprised how it provided these emotions that I didn’t think were possible.”
Participants’ speculative ideas that emerged in our generative discussion covered the realms of performance art, companion agent, entertainment, accessibility, security, and human well-being. We believe introducing the emotional haptics to more designers with first-hand experience of perceiving and interpreting the richness of touch could gain their interest in integrating the novel interactions into their design practice and expand the design space with their creativity.
DESIGN PROCESS
Inspired by the psychological finding, we started with designing a cardboard prototype with servo-driven tactors to replicate the commonly used social gestures. We pre-defined the haptic patterns for a decoding study, which showed that the emotional signals were recognizable by humans. We later refined the device and invited 11 designers to create the haptic cues for 8 emotions in an elicitation study. We found common patterns in generated tactile sensations for each emotion and collected typical strategies, metaphors, and reactions that the designers deployed in the design process. Given our positive results, we decided to develop a design toolkit with a similar approach: gesture-based servo-driven touches. We built prototypes of 1 DoF tactor module, conducted a formative study with 12 participants to figure out the design heuristics, and concluded with the decision to design TactorBots in a wearable modular form factor. More details about the design journey can be found on the TactorBots webpage (supporting link 1).
This work is inspired by the psychological findings that humans can convey specific emotions (e.g., anger, fear, happiness) to each other using social touch patterns. For instance, humans usually squeeze another person’s arm with trembling when afraid. This discovery of emotional haptics opens up a new opportunity for designers to enrich their work with more meaningful, connecting, and engaging interactions. However, nowadays’ haptic design is mainly restricted to vibration, which lacks the versatility of touch that a human’s hand can perform. After several iterations and evaluations, we designed TactorBots that can render a large number of robotic gestures driven by low-cost, lightweight micro servos. The open-source and user-friendly platform invites and enables designers with no background in engineering or haptics to create rich touch patterns that convey expressive signals.
MOTIVATION AND IMPACT
Touch, the very first sense to develop in the womb, is the primary sense for humans to explore the physical world and is integral to our everyday lives. As an interaction designer, I am particularly interested in exploring the power of the touch and am devoted to bringing haptic elements into my work. When first learning about the psychological findings that humans can communicate specific emotions to each other through touch alone, I was provoked to think about what if we could design robotic touches that express emotions and what novel design opportunities it would open up. To answer these questions, I built our team and started our journey. When starting the exploration, however, we noticed that the innovation about haptics is mostly restricted to market or academic research with expert hapticians. The design community with well-established theories and experiences of emotional design is not involved enough. The key challenge is a lack of easy-to-use haptic design tools, especially beyond conventional vibration, as imaging a haptic cue without direct perception is challenging, and building a haptic device from scratch requires specialized engineering skills.
To address this, we developed TactorBots, an open-source toolkit that empowers designers to explore emotional robotic touch and foster rapid prototyping, reflective perception, alternative interpretations, and creative imaginations. We deployed TactorBots and a custom booklet as design probes to a group of designers, artists, and researchers for a co-speculation exploration on envisioning the future of emotional haptics.
When designing with TactorBots, participants commented:
“It was magical to feel the tactor moving for the first time.”
“I was just surprised how it provided these emotions that I didn’t think were possible.”
Participants’ speculative ideas that emerged in our generative discussion covered the realms of performance art, companion agent, entertainment, accessibility, security, and human well-being. We believe introducing the emotional haptics to more designers with first-hand experience of perceiving and interpreting the richness of touch could gain their interest in integrating the novel interactions into their design practice and expand the design space with their creativity.
DESIGN PROCESS
Inspired by the psychological finding, we started with designing a cardboard prototype with servo-driven tactors to replicate the commonly used social gestures. We pre-defined the haptic patterns for a decoding study, which showed that the emotional signals were recognizable by humans. We later refined the device and invited 11 designers to create the haptic cues for 8 emotions in an elicitation study. We found common patterns in generated tactile sensations for each emotion and collected typical strategies, metaphors, and reactions that the designers deployed in the design process. Given our positive results, we decided to develop a design toolkit with a similar approach: gesture-based servo-driven touches. We built prototypes of 1 DoF tactor module, conducted a formative study with 12 participants to figure out the design heuristics, and concluded with the decision to design TactorBots in a wearable modular form factor. More details about the design journey can be found on the TactorBots webpage (supporting link 1).